
Supported Robot Platforms
The following open-source robot platforms are presently supported:
ExpCog does not extend or change the source code of these platforms in any way: they are usable as is. ExpCog will continue to include additional robot platforms in due course. If you have suggestions for including a specialized platform, please do let us know.
- Player - Gazebo
- iCub, YARP
- ROS
ExpCog does not extend or change the source code of these platforms in any way: they are usable as is. ExpCog will continue to include additional robot platforms in due course. If you have suggestions for including a specialized platform, please do let us know.
Gazebo
Gazebo is a multi-robot simulator capable of simulating a population of robots, sensors and objects in an indoor or outdoor 3D world. It generates both realistic sensor feedback and physically plausible interactions between objects (it includes an accurate simulation of rigid-body physics). Gazebo has been designed to recreate complex dynamic environments and provide the user with adequate physical behavior and sensor output. It is designed to accurately reproduce dynamic 3D environments. For this purpose, all simulated objects have various physical attributes to make them behave in a realistic way. The physical behavior is computed by the underlying ODE physics engine.
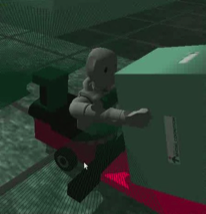
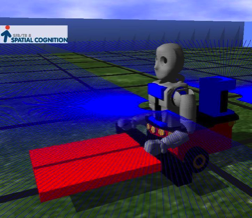
As a demonstration scenario, the Bandit Model within Gazebo has been re-constructed into the MoBot, which is a simulated laser-guided Mobile Robot with a functional platform and a laser scanner. MoBot is used to in a scenario involving the delivery of objects from one location to another.
Gazebo URL: http://playerstage.sourceforge.net/wiki/Gazebo
ROS
ROS (Robot Operating System) is a Robotic Platform developed as part of the STARIS project at Stanford University and the Personal Robots Program at Willows garage. A main focus of ROS is to provide a framework to implement robot control programs that can be used on clusters of computers. It provides an abstraction from the hardware level of the robot and supports the development of
ROS independent modules to increase the re-usability of code. The ROS consists of an operating system like part, which provides tools for the implementation, the development, and the organization of robot control software and a collection of packages which can be used within the the ROS framework to perform various tasks including vision, mapping, motion control, etc.
ROS independent modules to increase the re-usability of code. The ROS consists of an operating system like part, which provides tools for the implementation, the development, and the organization of robot control software and a collection of packages which can be used within the the ROS framework to perform various tasks including vision, mapping, motion control, etc.
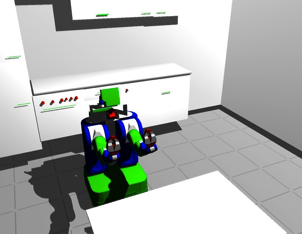
The ROS framework supports various robots including the PR2 (Personal Robot 2), developed at Willows Garage. The PR2 is a robotics research platform build for the domain of service robotics. The robot has wheels for mobility and is equipped with two arms to interact with the environment. To perceive the world, it uses various sensors including vision and laser scanner. To simulate the robots and test applications, ROS embeds the Gazebo simulator and provides the models of the supported robots.
ROS Wiki: http://www.ros.org/
iCub and YARP
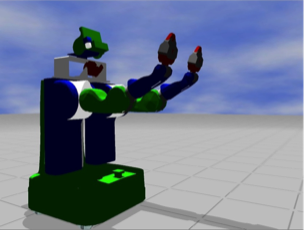
iCub is a humanoid robot developed as part of the EU project RobotCub. The iCub simulator is an open-source robot simulator specially designed to simulate the physics of the iCub robot. The simulator is designed to provide a tool for experimenting with the iCub robot without the need to use the real robot, e.g. if the robot is not available or if the control program might damage the robot. The simulator provides all functions of the real robot and provides several ways to interact with the robot.
Robotcub: http://www.robotcub.org/
iCub Simulator: http://www.robotcub.org/index.php/robotcub/results/icub_software
iCub Simulator: http://www.robotcub.org/index.php/robotcub/results/icub_software