Ziel dieses Projekts [58,13] ist die Bereitstellung eines
heterogenen Roboternetzwerks mit ![]() Robotern (
Robotern (
![]() ).
Dabei können sich die Architekturen und die zum Betrieb der Roboter verwendete
Software unterscheiden. Die gestellten Aufgaben sind, wie in diesem Projekt
auch, aus dem Bereich einer Büroumgebung. Dem Benutzer soll es dabei egal sein
können, welchem Roboter er die Aufgabe mitteilt und welcher ihn dann real ausführt.
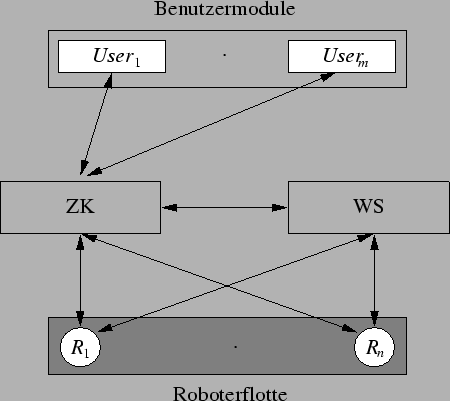
Diese Ebene wird durch spezielle Benutzerschnittstellen (
).
Dabei können sich die Architekturen und die zum Betrieb der Roboter verwendete
Software unterscheiden. Die gestellten Aufgaben sind, wie in diesem Projekt
auch, aus dem Bereich einer Büroumgebung. Dem Benutzer soll es dabei egal sein
können, welchem Roboter er die Aufgabe mitteilt und welcher ihn dann real ausführt.
Diese Ebene wird durch spezielle Benutzerschnittstellen (
![]() )
bereitgestellt. Dabei ist es egal, ob die Schnittstellen auf einem Roboter oder
einem anderen externen Rechner laufen. Ein Interface beinhaltet im Zusammenhang
mit der Sprachsteuerung einen Spracherkenner und einen Parser. Der dort generierte
Auftrag wird dann an die sogenannte Zentralkomponente (ZK) gesendet. An dieser
Stelle möchten wir bemerken, daß in diesem System nur ein Kommando existiert,
das alle weiteren Spezifikationen des Auftrags enthält. Zusätzlich besteht eine
bidirektionale Kommunikation zwischen der ZK und den Schnittstellen. Dadurch
können Rückmeldungen über den Verarbeitungsstatus an den Benutzer weitergegeben
werden. Außerdem sind die ZK und die einzelnen Roboter bidirektional verbunden.
Darüber wird der für einen Auftrag zuständige Roboter ermittelt. Diese Zuteilung
wird aufgrund der Fähigkeiten und einer subjektiven Zeitabschätzung der Roboter
selbst ermittelt. Es ist zum Beispiel nicht jeder Roboter in der Lage, etwas
aufzuheben, da nicht alle Roboter über einen Greifarm verfügen. Zusätzlich kann
für einen Auftrag eine Priorität vergeben werden. Alle über die Sprachsteuerung
eingegebenen Aufträge erhalten die gleiche Priorität. Wenn ein Auftrag keinem
Roboter zugewiesen werden kann, wird er zurückgestellt und zu einem späteren
Zeitpunkt versucht, ihn an einen Roboter zu vermitteln. Die letzte zu beschreibende
Komponente ist der Wissensserver (WS). Dieser ist mit allen Robotern und der
ZK verbunden. Die Module können Anfragen an den WS stellen, um zum Beispiel
die zu einem dem ausführenden Roboter unbekannten Namen gehörenden Koordinaten
zu erfragen. Grundlage dafür kann zum Beispiel eine abstrakte topologische Karte
der Umgebung sein. Zusätzlich müßte eine Abbildung von der topologischen Karte
auf das geometrische Modell des jeweiligen Roboters existieren. Da die Roboter
unterschiedliche geometrische Maßeinheiten verwenden könnten, wäre eine geometrische
Darstellung im WS nicht ratsam. Die Wissensbasis wurde mit ConceptBase [33]
erstellt, die ZK mit indiGOLOG (siehe 3.2.4).
)
bereitgestellt. Dabei ist es egal, ob die Schnittstellen auf einem Roboter oder
einem anderen externen Rechner laufen. Ein Interface beinhaltet im Zusammenhang
mit der Sprachsteuerung einen Spracherkenner und einen Parser. Der dort generierte
Auftrag wird dann an die sogenannte Zentralkomponente (ZK) gesendet. An dieser
Stelle möchten wir bemerken, daß in diesem System nur ein Kommando existiert,
das alle weiteren Spezifikationen des Auftrags enthält. Zusätzlich besteht eine
bidirektionale Kommunikation zwischen der ZK und den Schnittstellen. Dadurch
können Rückmeldungen über den Verarbeitungsstatus an den Benutzer weitergegeben
werden. Außerdem sind die ZK und die einzelnen Roboter bidirektional verbunden.
Darüber wird der für einen Auftrag zuständige Roboter ermittelt. Diese Zuteilung
wird aufgrund der Fähigkeiten und einer subjektiven Zeitabschätzung der Roboter
selbst ermittelt. Es ist zum Beispiel nicht jeder Roboter in der Lage, etwas
aufzuheben, da nicht alle Roboter über einen Greifarm verfügen. Zusätzlich kann
für einen Auftrag eine Priorität vergeben werden. Alle über die Sprachsteuerung
eingegebenen Aufträge erhalten die gleiche Priorität. Wenn ein Auftrag keinem
Roboter zugewiesen werden kann, wird er zurückgestellt und zu einem späteren
Zeitpunkt versucht, ihn an einen Roboter zu vermitteln. Die letzte zu beschreibende
Komponente ist der Wissensserver (WS). Dieser ist mit allen Robotern und der
ZK verbunden. Die Module können Anfragen an den WS stellen, um zum Beispiel
die zu einem dem ausführenden Roboter unbekannten Namen gehörenden Koordinaten
zu erfragen. Grundlage dafür kann zum Beispiel eine abstrakte topologische Karte
der Umgebung sein. Zusätzlich müßte eine Abbildung von der topologischen Karte
auf das geometrische Modell des jeweiligen Roboters existieren. Da die Roboter
unterschiedliche geometrische Maßeinheiten verwenden könnten, wäre eine geometrische
Darstellung im WS nicht ratsam. Die Wissensbasis wurde mit ConceptBase [33]
erstellt, die ZK mit indiGOLOG (siehe 3.2.4).
Dieses System arbeitet ebenfalls nach dem zweiten Prinzip; es lassen sich allerdings, wie oben beschrieben, verbale Rückmeldungen an den Benutzer über den Verarbeitungsstatus des Auftrags generieren. Da der Befehlsumfang geringer und lediglich die Syntax der Kommandos im Vergleich zu der einfachen Bibliothek differiert, konnte die Anpassung der Sprachkontrolle von der einfachen Bibliothek auf dieses System in kurzer Zeit bewerkstelligt werden. Dies ist dem modularen Aufbau des Systems und der automatischen Erstellungssoftware zu verdanken.